Zookeeper工作流
一旦ZooKeeper集合启动,它将等待客户端连接。客户端将连接到ZooKeeper集合中的一个节点。它可以是leader或follower节点。一旦客户端被连接,节点将向特定客户端分配会话ID并向该客户端发送确认。如果客户端没有收到确认,它将尝试连接ZooKeeper集合中的另一个节点。一旦连接到节点,客户端将以有规律的间隔向节点发送心跳,以确保连接不会丢失。
如果客户端想要读取特定的znode,它将会向具有znode路径的节点发送读取请求,并且节点通过从其自己的数据库获取来返回所请求的znode。为此,在ZooKeeper集合中读取速度很快。
如果客户端想要将数据存储在ZooKeeper集合中,则会将znode路径和数据发送到服务器。连接的服务器将该请求转发给leader,然后leader将向所有的follower重新发出写入请求。如果只有大部分节点成功响应,而写入请求成功,则成功返回代码将被发送到客户端。 否则,写入请求失败。绝大多数节点被称为Quorum。
ZooKeeper集合中的节点
让我们分析在ZooKeeper集合中拥有不同数量的节点的效果。
如果我们有单个节点,则当该节点故障时,ZooKeeper集合将故障。它有助于“单点故障",不建议在生产环境中使用。
如果我们有两个节点而一个节点故障,我们没有占多数,因为两个中的一个不是多数。
如果我们有三个节点而一个节点故障,那么我们有大多数,因此,这是最低要求。ZooKeeper集合在实际生产环境中必须至少有三个节点。
如果我们有四个节点而两个节点故障,它将再次故障。类似于有三个节点,额外节点不用于任何目的,因此,最好添加奇数的节点,例如3,5,7。
我们知道写入过程比ZooKeeper集合中的读取过程要贵,因为所有节点都需要在数据库中写入相同的数据。因此,对于平衡的环境拥有较少数量(例如3,5,7)的节点比拥有大量的节点要好。
下图描述了ZooKeeper工作流,后面的表说明了它的不同组件。
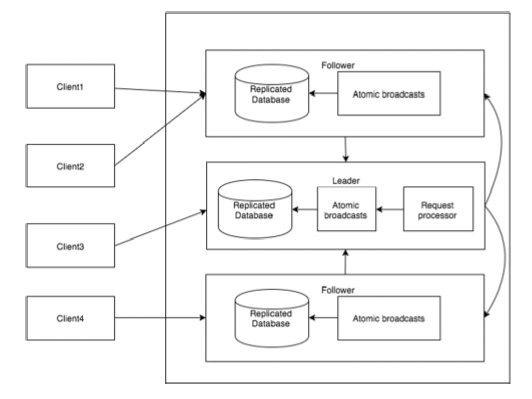
组件
描述
写入(write)
写入过程由leader节点处理。leader将写入请求转发到所有znode,并等待znode的回复。如果一半的znode回复,则写入过程完成。
读取(read)
读取由特定连接的znode在内部执行,因此不需要与集群进行交互。
复制数据库(replicated database)
它用于在zookeeper中存储数据。每个znode都有自己的数据库,每个znode在一致性的帮助下每次都有相同的数据。
Leader
Leader是负责处理写入请求的Znode。
Follower
follower从客户端接收写入请求,并将它们转发到leader znode。
请求处理器(request processor)
只存在于leader节点。它管理来自follower节点的写入请求。
原子广播(atomic broadcasts)
负责广播从leader节点到follower节点的变化。
Last updated